当サイトでは、第三者配信の広告サービス(Googleアドセンス)を利用しております。
データと予測値の差の二乗和が最小となるようにパラメータを決定する手法。
\(N\) 個のデータと\(M\) 個のパラメータ(\(N>M\))を、それぞれ縦ベクトルの形で
とし、それらが方程式 \(\bm{d} = \bm{G}\bm{m}\) で記述できるとき、\(\bm{m}\) の最小二乗解は
最小二乗法
最小二乗法(method of least squares)は、データと予測値の差の二乗和が最小となるようにパラメータを決定する手法です。
最小二乗法を行列の形で定式化してみましょう。
\(N\) 個のデータと\(M\) 個のパラメータ(\(N>M\))を、それぞれ縦ベクトルの形で
とします。\(\TT\) は転置を表します。
パラメータとは、例えば直線の傾きや切片に相当します。
ここで、データ \(\bm{d}\) とパラメータ \(\bm{m}\) の関係を
と記述できるとします。ただし、\(\bm{G}\) は \(N\times M\) の行列です。
このとき、観測されたデータ \(\bm{d}^{\mathrm{obs}}\) から最小二乗法に基づいて推定されるパラメータ \(\bm{m}^{\mathrm{est}}\) は、以下で表されます。
\(\mathrm{obs}\) は観測(observation), \(\mathrm{est}\) は推定(estimation)の意味です。
最小二乗法が適用できるのは、パラメータの数 \(M\) よりデータの数 \(N\) のほうが大きいときであることに注意が必要です。
正確には、\(\mathrm{rank}(\bm{G}) = M < N\) であることが条件です。ここでは、\(\bm{G}\) のランク落ちはないものとしています。
最小二乗法によるフィッティング
最小二乗法の具体例として、直線・二次関数・円のフィッティングを考えてみましょう。
直線フィッティング
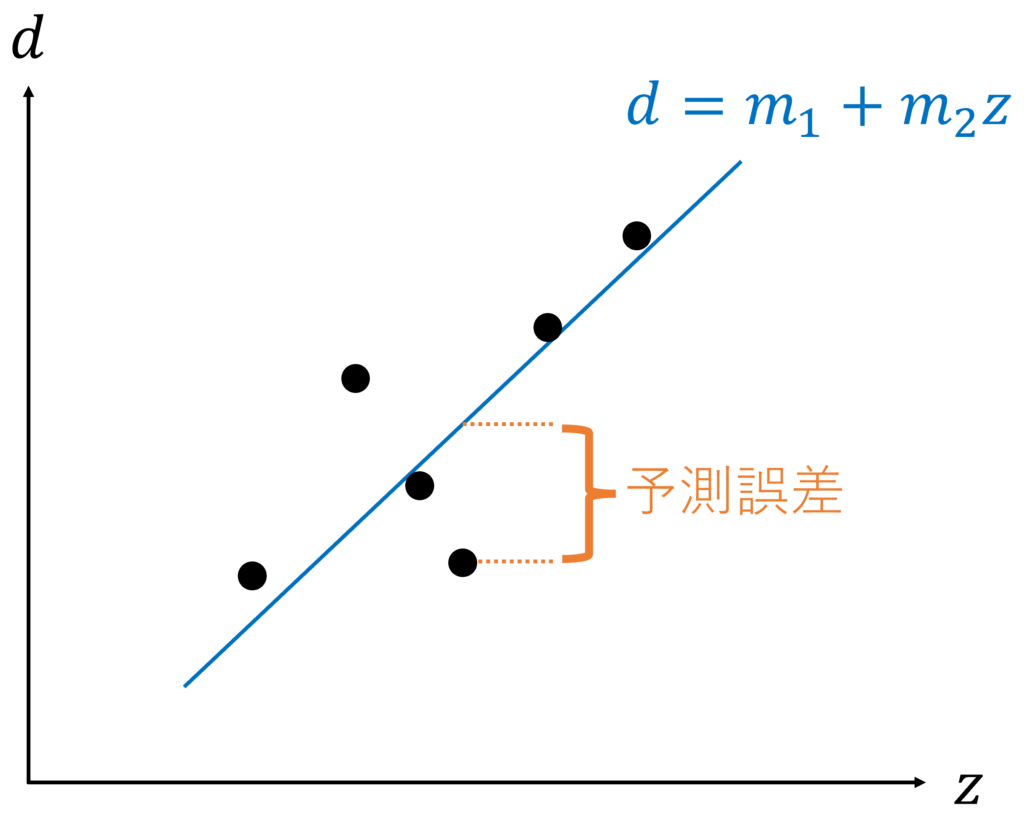
\(i\) 番目のデータ \(d_i\,(i=1,2,...,N)\) が、説明変数 \(z_i\) とパラメータ \(m_1,m_2\) を用いて
と記述できるときを考えます。パラメータは \(2\) つなので、\(M=2\) です。
このとき、方程式 \(\bm{d}=\bm{G}\bm{m}\) は、以下のように表されます。
上記の通り、行列 \(\bm{G}\) の大きさは \(N\times 2\) となります。求めるパラメータの推定値 \(\bm{m}^{\mathrm{est}}\) は
で表されます。この解を詳しく見てみましょう。
まず、\(\bm{G}^\TT\bm{G}\) は
となります。
\(\sum\limits_i = \sum\limits_{i=1}^N\) のように略記しています。
また、\(\bm{G}^\TT\bm{d}\) は
となります。以上より、方程式を展開していくと
となります。\(\bar{d} = \frac{1}{N}\sum\limits_i d_i, \bar{z} = \frac{1}{N}\sum\limits_i z_i\) を用いながら式を整理すると、
を得ます。
最小二乗法に基づいてプログラムを実装し、直線フィッティングをしてみましょう。
観測値 \(d_i^{\mathrm{obs}}\,(i=1,2,...,N)\) を
と定めます。ここで、\(\alpha,\beta\) は定数で、\(\varepsilon_i\) は正規分布に従う変数です。
まず、必要なライブラリをインポートします。
import numpy as np # v1.20.3
import matplotlib.pyplot as plt # v3.4.3
plt.style.use('ggplot')
パラメータを設定し、データを作成します。
alpha = 3
beta = 2
N = 20
z = np.linspace(0,5,N).reshape(N,1)
np.random.seed(1)
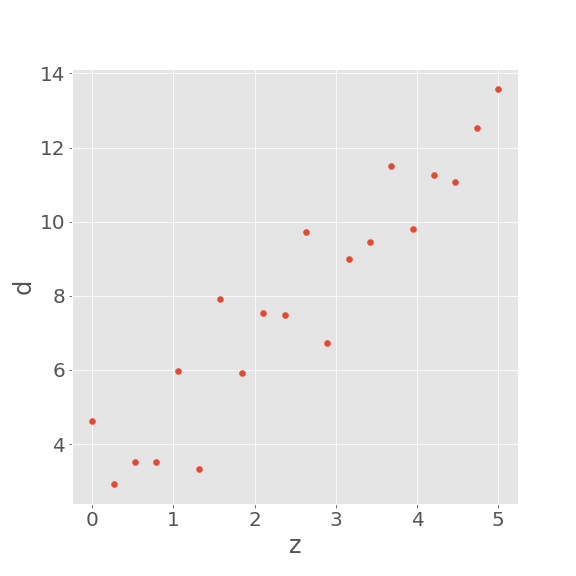
d_obs = alpha + beta*z + np.random.randn(N,1)
例えば、以下のようにデータが得られます。
行列 \(\bm{G}\) を作成し、推定パラメータ \(\bm{m}^{\mathrm{est}}\) を算出します。
M = 2
G = np.zeros((N,M))
for i in range(N):
G[i,0] = 1
G[i,1] = z[i]
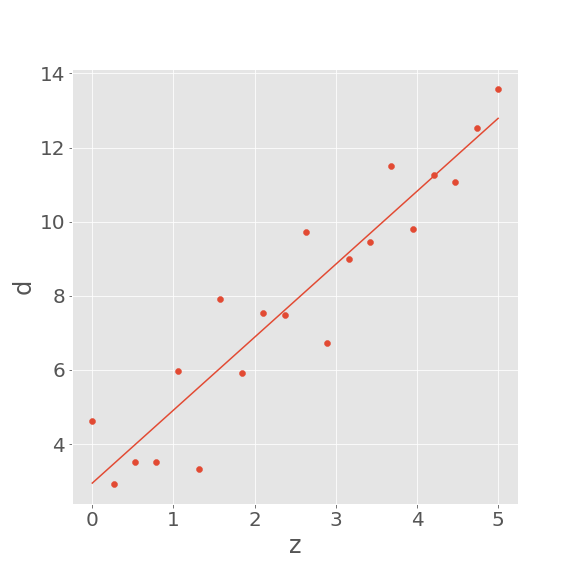
m_est = np.dot(np.dot(np.linalg.inv(np.dot(G.T,G)),G.T),d_obs)
推定したパラメータをもとに直線を引いてみると、確かにデータに沿うような直線を求めることができていることがわかります。
二次関数
\(i\) 番目のデータ \(d_i\,(i=1,2,...,N)\) が、説明変数 \(z_i\) とパラメータ \(m_1,m_2,m_3\) を用いて
と記述できるときを考えます。パラメータは \(3\) つなので、\(M=3\) です。
このとき、方程式 \(\bm{d}=\bm{G}\bm{m}\) は、以下のように表されます。
行列 \(\bm{G}\) の大きさは \(N\times 3\) となります。
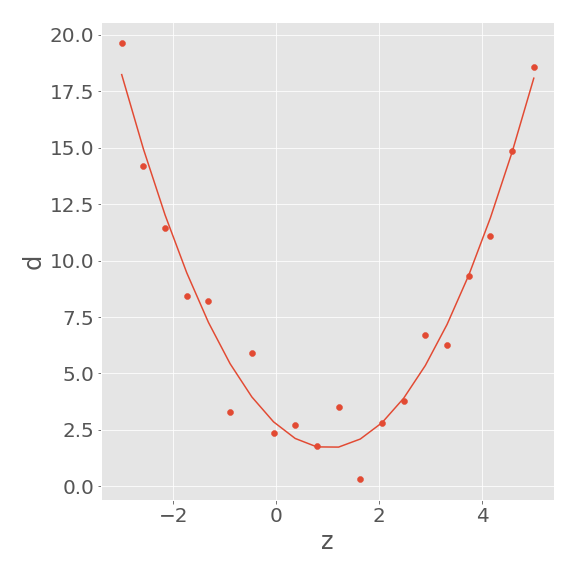
最小二乗法に基づいてプログラムを実装し、二次関数のフィッティングをしてみましょう。
観測値 \(d_i^{\mathrm{obs}}\,(i=1,2,...,N)\) を
と定めます。ここで、\(\alpha,\beta,\gamma\) は定数で、\(\varepsilon_i\) は正規分布に従う変数です。
パラメータを設定し、データを作成します。
alpha = 3
beta = -2
gamma = 1
N = 20
z = np.linspace(-3,5,N).reshape(N,1)
np.random.seed(1)
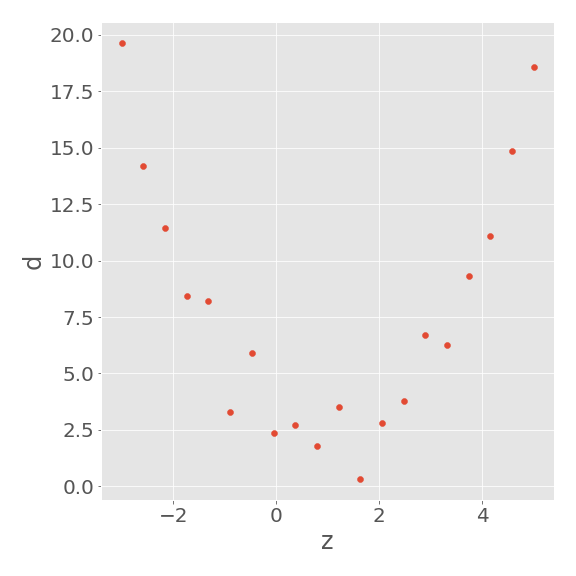
d_obs = alpha + beta*z + gamma*z**2 + np.random.randn(N,1)
例えば、以下のようにデータが得られます。
行列 \(\bm{G}\) を作成し、推定パラメータ \(\bm{m}^{\mathrm{est}}\) を算出します。
M = 3
G = np.zeros((N,M))
for i in range(N):
G[i,0] = 1
G[i,1] = z[i]
G[i,2] = z[i]**2
m_est = np.dot(np.dot(np.linalg.inv(np.dot(G.T,G)),G.T),d_obs)
推定したパラメータをもとに二次関数を描いてみると、確かにデータに沿うような曲線が得られていることがわかります。
円
\(N\) 個の点群 \((x_i,y_i)\,(i=1,2,...,N)\) が、中心 \((\alpha,\beta)\), 半径 \(\gamma\) の円の円周上にある、すなわち
の関係が成立するとします。式を変形して、
を得ます。左辺を観測値 \(d_i\) とおき、パラメータ \(m_1,m_2,m_3\) を
と定めれば、関係式は
と表現できます。パラメータは \(3\) つなので、\(M=3\) です。
以上より、方程式 \(\bm{d}=\bm{G}\bm{m}\) は、以下で表現されます。
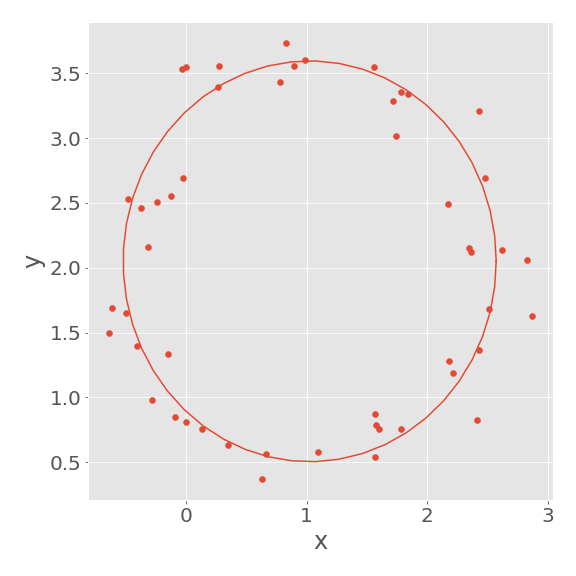
最小二乗法に基づいてプログラムを実装し、円のフィッティングをしてみましょう。
観測値 \(x_i^{\mathrm{obs}},y_i^{\mathrm{obs}},d_i^{\mathrm{obs}}\,(i=1,2,...,N)\) を
と定めます。ここで、\(0\leq\theta_i<2\pi\) であり、\(\alpha,\beta,n\) は定数、\(\gamma\) は正の定数、\(\varepsilon_{xi},\varepsilon_{yi}\) は正規分布に従う変数です。
パラメータを設定し、データを作成します。
alpha = 1
beta = 2
gamma = 1.5
n = 0.2
N = 50
theta = np.linspace(0,2*np.pi,N).reshape(N,1)
np.random.seed(1)
x_obs = gamma*np.cos(theta) + alpha + n*np.random.randn(N,1)
y_obs = gamma*np.sin(theta) + beta + n*np.random.randn(N,1)
d_obs = x_obs**2 + y_obs**2
例えば、以下のようにデータが得られます。

行列 \(\bm{G}\) を作成し、推定パラメータ \(\bm{m}^{\mathrm{est}}\) を算出します。
M = 3
G = np.zeros((N,M))
for i in range(N):
G[i,0] = x_obs[i]
G[i,1] = y_obs[i]
G[i,2] = 1
m_est = np.dot(np.dot(np.linalg.inv(np.dot(G.T,G)),G.T),d_obs)
推定したパラメータ \(m_1,m_2,m_3\) を \(\alpha,\beta,\gamma\) に変換します。
alpha_est = m_est[0]/2
beta_est = m_est[1]/2
gamma_est = (alpha_est**2+beta_est**2+m_est[2])**(1/2)
推定したパラメータをもとに円を描いてみると、確かにデータに沿うような円が得られていることがわかります。
導出
本節では、最小二乗法の導出を行います。
\(N\) 個のデータと\(M\) 個のパラメータ(M<N)を、それぞれ縦ベクトルの形で
とします。\(\TT\) は転置を表します。
ここで、データ \(\bm{d}\) とパラメータ \(\bm{m}\) の関係が
で記述できるとします。ただし、\(\bm{G}\) は \(N\times M\) の行列です。
観測されるデータ \(\bm{d}^{\mathrm{obs}}\) と予測値 \(\bm{d}^{\mathrm{pre}}\) の誤差は、
で表されます。
\(\mathrm{obs}\) は観測(observation), \(\mathrm{pre}\) は予測(prediction)の意味です。
最小二乗法は、予測誤差 \(\bm{e}\) の二乗和
を最小にするようにパラメータ \(\bm{m}\) を設計する手法になります。
\(\|\bm{e}\|_2\) は \(\bm{e}\) の \(L^2\) ノルムを意味し、\(\|\bm{e}\|_2 = \left(\sum\limits_{i} e_i^2\right)^{1/2}\) で定義されます。
\(E\) を具体的に計算すると
となります。
\(\mathrm{est}\) は推定(estimation)の意味です。
以降、\(\mathrm{est}, \mathrm{obs}\) の表記は省略します。\(E\) をさらに展開して
ここで、\(\bm{d}^\TT\bm{G}\bm{m}\) はスカラーであり、
が成り立つので、
とできます。右辺第三項について、
となります。パラメータ\(m_j\) の係数は正なので、予測誤差の二乗和 \(E\) は \(\bm{m}\) について下に凸です。
よって、求めるパラメータは、\(E\) の \(\bm{m}\) に関する微分が \(0\) になるときの \(\bm{m}\) になります。つまり、
を解けばよいことになります。
まず、式 \eqref{eq:E} の第一項については、\(\bm{m}\) を含まないため、微分は \(0\) になります。
次に、式 \eqref{eq:E} の第二項については、\(-2\bm{G}^\TT\bm{d}\) となります。
\(\bm{m}\) が縦ベクトルなので、\(\bm{d}^\TT\bm{G}\) を転置する必要があります。
最後に、式 \eqref{eq:E} の第三項については、\(\bm{m}\) が二つあることに注意して、
となります。以上より、式 \eqref{eq:delE} は
\(\bm{G}^\TT\bm{G}\) の逆行列の存在を仮定することで、求めるパラメータの推定値 \(\bm{m}^{\mathrm{est}}\) は
と求まります。
\(\bm{G}\) は \(N\times M\) の行列であり、\(M<N\) なので、逆行列が存在しませんでした。一方、\(\bm{G}^\TT\bm{G}\) は \(M\times M\) の正方行列なので、\(\mathrm{rank}(\bm{G}) = M\) のとき、逆行列が存在することになります。
参考文献
- W. メンケ(1997)『離散インバース理論 ー逆問題とデータ解析』(柳谷俊・塚田和彦訳)古今書院 pp.35,36,41-44